
MCP2Serial
STDIOBridge connecting physical devices to AI models via serial communication
Bridge connecting physical devices to AI models via serial communication
English | 简体中文
通过自然语言控制硬件,开启物联网新纪元
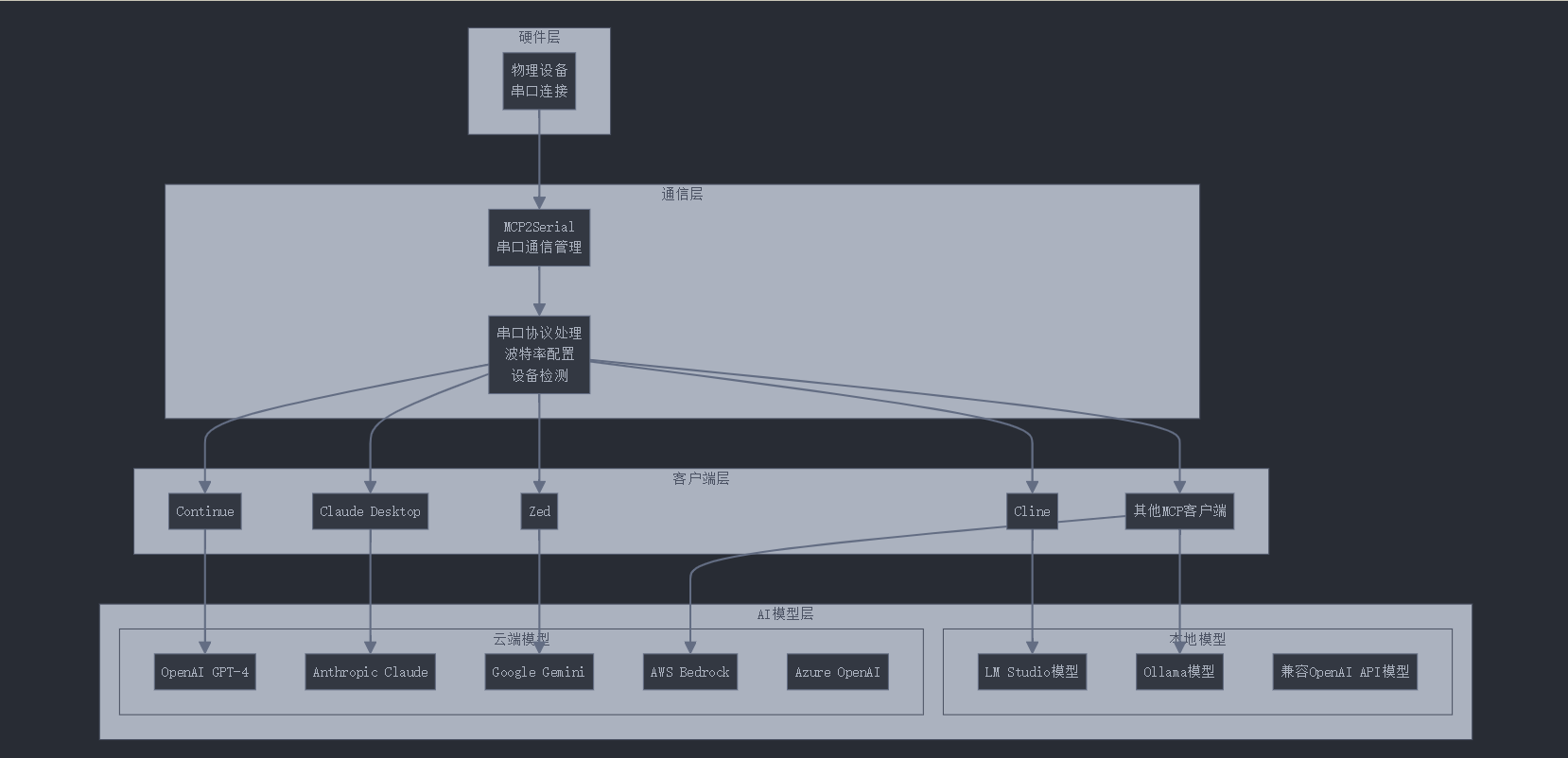
MCP2Serial 系统架构图
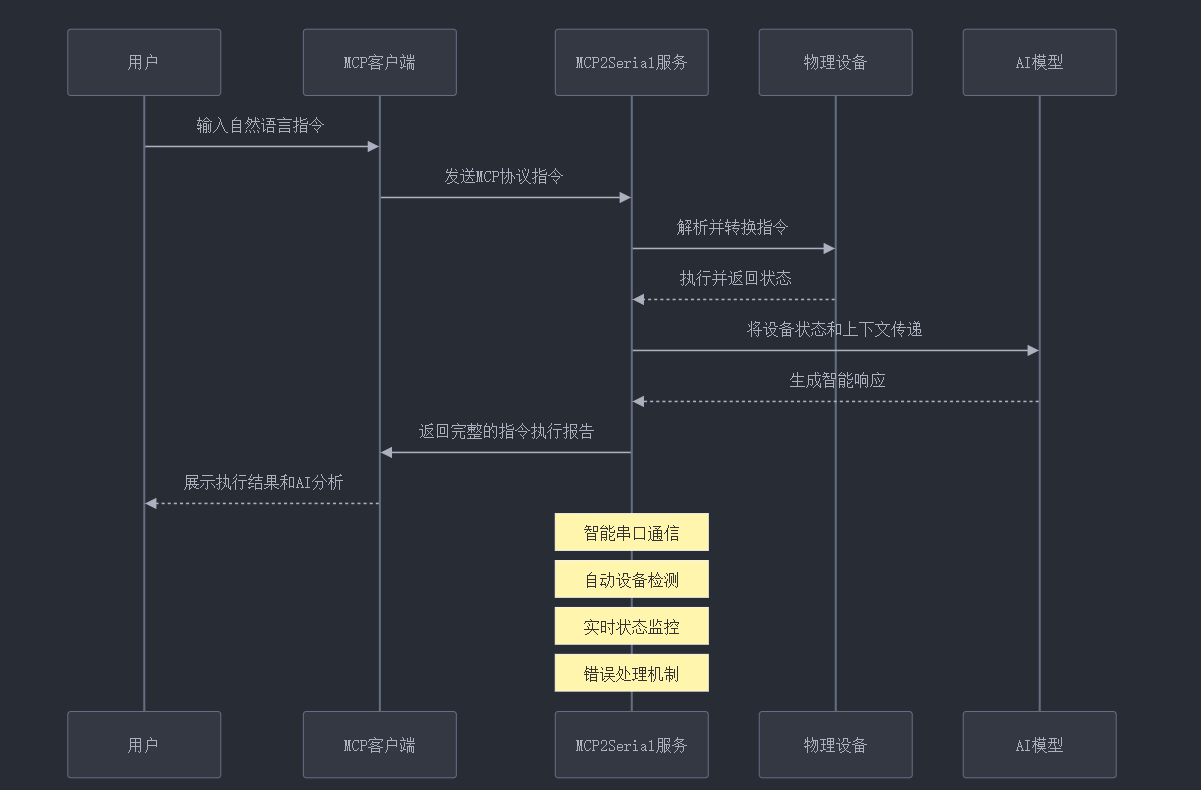
MCP2Serial 工作流程图
MCP2Serial 将串口设备接入AI大模型的项目,它通过 Model Context Protocol (MCP) 将物理世界与 AI 大模型无缝连接。最终实现:
智能串口通信
MCP 协议集成
MCP2Serial 支持所有实现了 MCP 协议的客户端,包括:
| 客户端 | 特性支持 | 说明 |
|---|---|---|
| Claude Desktop | 完整支持 | 推荐使用,支持所有 MCP 功能 |
| Continue | 完整支持 | 优秀的开发工具集成 |
| Cline | 资源+工具 | 支持多种 AI 提供商 |
| Zed | 基础支持 | 支持提示词命令 |
| Sourcegraph Cody | 资源支持 | 通过 OpenCTX 集成 |
| Firebase Genkit | 部分支持 | 支持资源列表和工具 |
得益于灵活的客户端支持,MCP2Serial 可以与多种 AI 模型协同工作:
Python3.11 或更高版本 Claude Desktop 或 Cline
下载 install.py
python install.py
# 下载安装脚本 curl -O https://raw.githubusercontent.com/mcp2everything/mcp2serial/main/install_macos.py # 运行安装脚本 python3 install_macos.py
# 下载安装脚本 curl -O https://raw.githubusercontent.com/mcp2everything/mcp2serial/main/install_ubuntu.py # 运行安装脚本 python3 install_ubuntu.py
安装脚本会自动完成以下操作:
windows powershell -ExecutionPolicy ByPass -c "irm https://astral.sh/uv/install.ps1 | iex" MacOS curl -LsSf https://astral.sh/uv/install.sh | sh
主要依赖uv工具,所以当python和uv以及Claude或Cline安装好后就可以了。
在你的 MCP 客户端(如 Claude Desktop 或 Cline)配置文件中添加以下内容: 注意:如果使用的自动安装那么会自动配置Calude Desktop无需此步。 使用默认配置文件:
{ "mcpServers": { "mcp2serial": { "command": "uvx", "args": [ "mcp2serial" ] } } }
注意:修改配置后需要重启Cline或者Claude客户端软件
配置串口和命令: 注意下面的配置默认为COM11 需要根据实际进行修改
# config.yaml serial: port: COM11 # 或自动检测 baud_rate: 115200 # 可选,默认 115200 timeout: 1.0 # 可选,默认 1.0 read_timeout: 1.0 # 读取超时时间,1秒内不应答则报错 response_start_string: OK # 可选,串口应答的开始字符串,默认为OK commands: set_pwm: command: "PWM {frequency}\n" need_parse: false prompts: - "把PWM调到{value}"
配置文件(config.yaml)可以放在不同位置,程序会按以下顺序查找:
./config.yamlC:\Projects 运行程序,它会查找 C:\Projects\config.yaml# Windows系统 C:\Users\用户名\.mcp2serial\config.yaml # macOS系统 /Users/用户名/.mcp2serial/config.yaml # Linux系统 /home/用户名/.mcp2serial/config.yaml
.mcp2serial 目录:
# Windows系统(在命令提示符中) mkdir "%USERPROFILE%\.mcp2serial" # macOS/Linux系统 mkdir -p ~/.mcp2serial
# Windows系统(需要管理员权限) C:\ProgramData\mcp2serial\config.yaml # macOS/Linux系统(需要root权限) /etc/mcp2serial/config.yaml
# Windows系统(以管理员身份运行) mkdir "C:\ProgramData\mcp2serial" # macOS/Linux系统(以root身份运行) sudo mkdir -p /etc/mcp2serial sudo chown root:root /etc/mcp2serial sudo chmod 755 /etc/mcp2serial
程序会按照上述顺序查找配置文件,使用找到的第一个有效配置文件。根据你的需求选择合适的位置:
在 config.yaml 中添加自定义命令:
默认不使用真实串口 用模拟串口来演示则无需修改
serial: # 串口配置 port: LOOP_BACK # 可选,如果不指定则自动查找。设置为LOOP_BACK时启用回环模式,发送什么就接收什么 baud_rate: 115200 # 可选,默认 115200 timeout: 1.0 # 可选,默认 1.0 read_timeout: 1.0 # 读取超时时间,1秒内不应答则报错 response_start_string: CMD # 可选,串口应答的开始字符串,默认为OK commands: # PWM控制命令 set_pwm: command: "CMD_PWM {frequency}" # 实际发送的命令格式,server会自动添加\r\n need_parse: false # 不需要解析响应内容 prompts: - "把PWM调到最大" - "把PWM调到最小" - "请将PWM设置为{value}" - "关闭PWM" - "把PWM调到一半"
使用真实串口
# config.yaml serial: port: COM11 # 或自动检测 baud_rate: 115200 # 可选,默认 115200 timeout: 1.0 # 可选,默认 1.0 read_timeout: 1.0 # 读取超时时间,1秒内不应答则报错 response_start_string: OK # 可选,串口应答的开始字符串,默认为OK commands: set_pwm: command: "PWM {frequency}\n" need_parse: false prompts: - "把PWM调到{value}"
指定配置文件: 比如指定加载Pico配置文件:Pico_config.yaml
{ "mcpServers": { "mcp2serial": { "command": "uvx", "args": [ "mcp2serial", "--config", "Pico" //指定配置文件名,不需要添加_config.yaml后缀 ] } } }
为了能使用多个串口,我们可以新增多个mcp2serial的服务 指定不同的配置文件名即可。 如果要接入多个设备,如有要连接第二个设备: 指定加载Pico2配置文件:Pico2_config.yaml
{ "mcpServers": { "mcp2serial2": { "command": "uvx", "args": [ "mcp2serial", "--config", "Pico2" //指定配置文件名,不需要添加_config.yaml后缀 ] } } }
简单响应(need_parse: false):
需要解析的响应(need_parse: true):
result.raw 字段中返回config.yaml中配置正确的端口号和波特率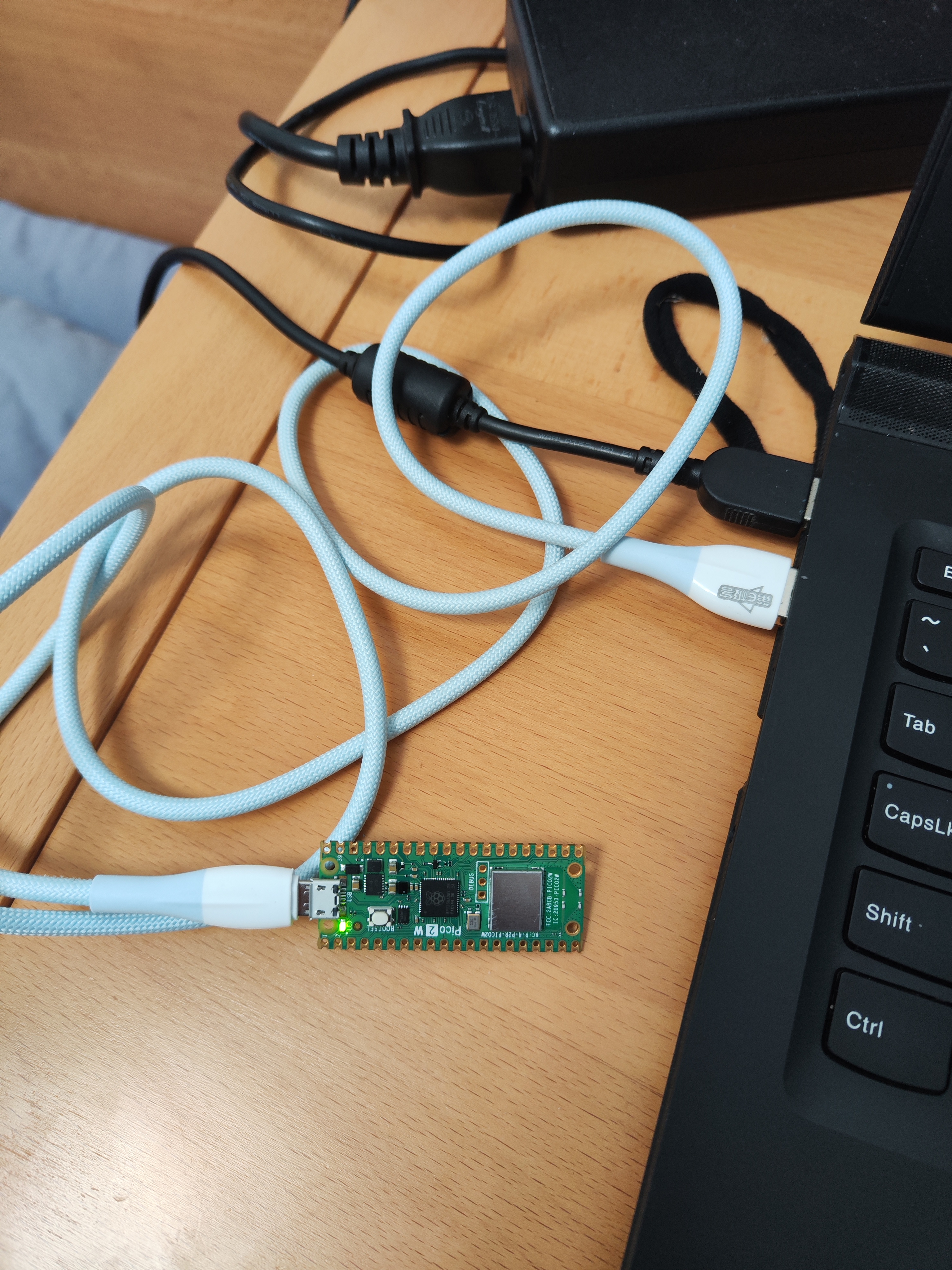
硬件连接和COM端口配置

Example in Claude
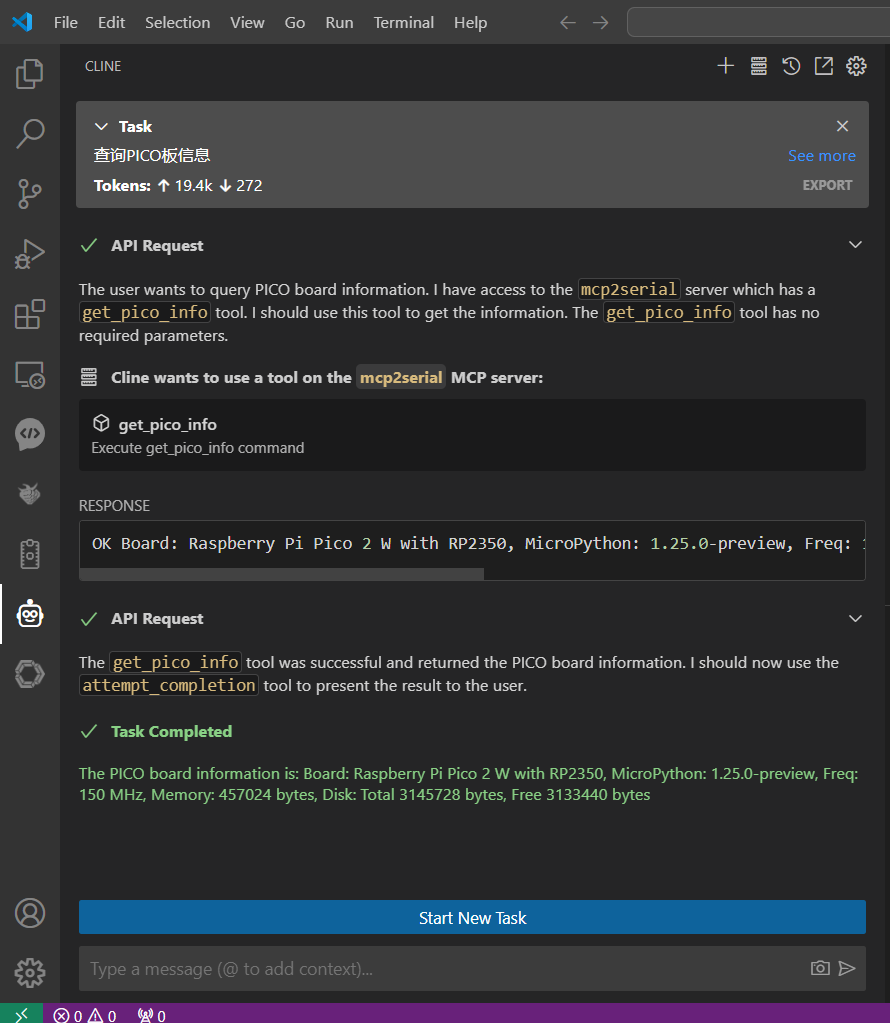
Example in Cline
firmware可以在项目仓库中下载,目前演示的是Pico的micropython代码案例。另存到Pico开发板运行即可。
# 通过源码安装: git clone https://github.com/mcp2everything/mcp2serial.git cd mcp2serial # 创建虚拟环境 uv venv .venv # 激活虚拟环境 # Windows: .venv\Scripts\activate # Linux/macOS: source .venv/bin/activate # 安装开发依赖 uv pip install --editable .
serial: # 串口配置 port: LOOP_BACK # 可选,如果不指定则自动查找。设置为LOOP_BACK时启用回环模式,发送什么就接收什么 baud_rate: 115200 # 可选,默认 115200 timeout: 1.0 # 可选,默认 1.0 read_timeout: 1.0 # 读取超时时间,1秒内不应答则报错 response_start_string: CMD # 可选,串口应答的开始字符串,默认为OK commands: # PWM控制命令 set_pwm: command: "CMD_PWM {frequency}" # 实际发送的命令格式,server会自动添加\r\n need_parse: false # 不需要解析响应内容 prompts: - "把PWM调到最大" - "把PWM调到最小" - "请将PWM设置为{value}" - "关闭PWM" - "把PWM调到一半"
如果使用真实串口
# config.yaml serial: port: COM11 # 或自动检测 baud_rate: 115200 # 可选,默认 115200 timeout: 1.0 # 可选,默认 1.0 read_timeout: 1.0 # 读取超时时间,1秒内不应答则报错 response_start_string: OK # 可选,串口应答的开始字符串,默认为OK commands: set_pwm: command: "PWM {frequency}\n" need_parse: false prompts: - "把PWM调到{value}"
在使用支持MCP协议的客户端(如Claude Desktop或Cline)时,需要在客户端的配置文件中添加以下内容: 直接自动安装的配置方式 源码开发的配置方式
{ "mcpServers": { "mcp2serial": { "command": "uv", "args": [ "--directory", "你的实际路径/mcp2serial", // 例如: "C:/Users/Administrator/Documents/develop/my-mcp-server/mcp2serial" "run", "mcp2serial" ] } } }
{ "mcpServers": { "mcp2serial": { "command": "uv", "args": [ "--directory", "你的实际路径/mcp2serial", // 例如: "C:/Users/Administrator/Documents/develop/my-mcp-server/mcp2serial" "run", "mcp2serial", "--config", // 可选参数,指定配置文件名 "Pico" // 可选参数,指定配置文件名,不需要添加_config.yaml后缀 ] } } }
# 确保已激活虚拟环境 .venv\Scripts\activate # 运行服务器(使用默认配置config.yaml 案例中用的LOOP_BACK 模拟串口,无需真实串口和串口设备) uv run src/mcp2serial/server.py 或 uv run mcp2serial # 运行服务器(使用指定配置Pico_config.yaml) uv run src/mcp2serial/server.py --config Pico 或 uv run mcp2serial --config Pico
智能家居自动化
工业自动化
教育和研究
原型开发
工业协议支持
硬件接口扩展
统一集成平台
智能功能
插件市场
云服务集成
垂直领域适配
定制化服务
MCP2Serial 正在开启物联网的新篇章:
MCP2Serial 正在开启物联网的新篇章:
我们欢迎各种形式的贡献,无论是新功能、文档改进还是问题报告。查看 贡献指南 了解更多信息。
本项目采用 MIT 许可证 - 详见 LICENSE 文件